A partir de la decada de los 80 la mayor parte de las innovaciones habia que verificarlas con equipos de diagnosis debido a la incorporacion
de la electronica, y no a la
incorporacion de mejoras mecanicas. Se añadieron multitud de sensores y se fueron mejorando las unidades de control del motor. Hoy en dia un
automovil puede incorporar mas de 200 sensores y mas de una unidad de control. Hay unidades de control para el motor, climatizador, airbag, etc.
en la evolucion del automovil y de la diagnosis
Las primeras unidades de control eran Modulos de Control de Motor o UCEs y con el tiempo estas UCEs o Centralitas electronicas se hicieron mas
complejas y pasaron a convertirse en Unidades de Control Electronico que hoy en dia de conocen como
Centralitas electronicas o UCEs cuyas siglas en español son las de Unidad de Control Electronico que se suelen chequear
con los equipos de diagnosis.
Actualmente los sensores se encargan de la medicion de temperaturas, presiones, rotaciones, volumenes, y multitud de parametros de funcionamiento y la
unica forma de medirlos es con un equipo de diagnosis ya que
la informacion que captan los sensores es enviada y almacenada en las Centralitas Electronicas o UCEs.
Toda esta informacion permite que el propio automovil "conozca"
su estado, pero en realidad, los sensores se limitan a detectar una serie de valores que envian a las UCEs o Centralitas y una vez alli son
comparados con los valores optimos almacenados en sus memorias y cuando encuentran un valor incorrecto, la UCE o Centralita notifica
un fallo avisando al conductor de alguna forma (indicadores luminosos, sonidos, etc), que hay que chequear el coche con los equipos de diagnosis para
borrar dichos fallos.
Cuando un coche sufre una averia, el taller mecanico usara un equipo de diagnosis o escaner para conectarse con la centralita del vehiculo.
El equipo de diagnosis es un dispositivo
que se conecta a una centralita para acceder a los datos que esta tiene almacenados en la memoria, siendo capaz de mostrar los fallos y
los valores que esten almacenados en las UCEs o Centralitas.

Para combatir los problemas de la contaminacion del automovil en USA (Los Angeles), el Estado de California exigio sistemas de control de
emisiones de gases en los coches fabricados a partir de 1966 con el fin de reducir la contaminacion. Pues el Gobierno Federal de los Estados Unidos
no solo impuso esta normativa en California sino que extendio estos controles a toda la nacion en 1968, aprobando el Congreso el
Clean Air Act (Acta Antipolucion) en 1970 y a su vez creo la Agencia de Proteccion Medioambiental o
EPA (Environmental Protection Agency), iniciando la EPA el desarrollo de una serie de estandares de obligado cumplimiento
que miden la emision de gases con unos requerimientos para el mantenimiento de los vehiculos a fin de ampliar su vida util porque se podian chequear
con equipos de diagnosis.
Para cumplir estos estandares los fabricantes de automoviles implementaron sistemas de encendido electronico y de alimentacion de combustible en la decada de
los 70 y 80 controlada
con sensores que miden las prestaciones del motor y ajustan los sistemas electronicos para conseguir una minima contaminacion y, ademas, estos sensores
tambien permiten una cierta ayuda en la reparacion de los automoviles ya que se pueden chequear las averias con equipos de diagnosis.

En abril de 1985 un organismo estatal de California, el CARB (California Air Resources Board), aprobo una regulacion para un
sistema de diagnostico a bordo u OBD (On-Board Diagnostic). Esta regulacion que se aplica a los automoviles vendidos en el
estado de California a partir de 1988, especifica
que el Modulo de Control de Motor o UCE debe monitorizar ciertos componentes del vehiculo relacionados con las emisiones de
gases para asegurar un correcto funcionamiento, y que se ilumine una lampara Indicadora de Fallo o MIL (Malfunction Indicator Lamp) en el cuadro de
mandos cuando se detecta un problema. El sistema OBD tambien aporta un sistema de Codigos de Error de Diagnostico o DTC
(Diagnostic Trouble Codes) que se pueden medir con los equipos de diagnosis
y unas tablas de errores en los manuales de reparacion para ayudar a los tecnicos mecanicos a determinar las causas mas probables de averia en el
motor y problemas en las emisiones. Los objetivos basicos de esta regulacion son fundamentalmente dos:
- Reforzar el cumplimiento de las normativas de la regulacion de la emision de gases alertando al conductor cuando se presenta un fallo.
- Ayudar a los tecnicos mecanicos de reparacion de automoviles en la identificacion y reparacion de fallos en el sistema de control de emisiones y
que pueden verificar con los equipos de diagnosis.
Las autodiagnosis de OBD se aplican a sistemas que se consideran la causa principal de un significativo incremento en las emisiones de gases de escape
en caso de fallo. Principalmente se incluyen:
- Los sensores principales del motor
- El sistema de medicion del combustible
- Funcion de Recirculacion de Gases de Escape o EGR (Exhaust Gas Recirculation)
Los Sistemas de Diagnostico a Bordo u OBD se encuentran en la mayoria de automoviles y camiones ligeros actuales. Durante la decada de los 70 y principio
de los 80 se introdujeron componentes electronicos para cumplir los estandares de emision de gases de la EPA, posteriormente la implantacion de
sistemas OBD para controlar funciones del motor y diagnosticar problemas supuso una mayor complejidad en la electronica integrada en los
vehiculos.
A traves de los años los sistemas OBD se han hecho mas sofisticados y se desarrollo el OBD-II que es un nuevo estandar
introducido a mediados de los 90
que aporta un control casi completo del motor y tambien chequea partes del chasis y otros dispositivos del vehiculo. Asimismo es el centro de control
de diagnostico del coche y, con el tiempo, los primitivos Modulos de Control de Motor o UCEs se han hecho mas complejos y han pasado a convertirse en
las actuales Unidades de Control Electronico o UCE que son unas verdaderas cajas negras de los vehiculos.

Inicialmente hubo varios estandards y cada fabricante tenia sus propios sistemas y codigos. En 1988 la
Sociedad de Ingenieros de Automocion o SAE (Society of Automotive Engineers) definio un conector estandard y un conjunto de codigos de diagnostico.
La EPA adopto la mayoria de los estandards y recomendaciones de la SAE sobre las aplicaciones OBD. Posteriormente con OBD-II, un conjunto mas amplio
de estandards y sistemas tambien definidos por la SAE y adoptado por la EPA y el CARB es aprobado para su
implementacion el 1 de enero de 1996.
Para aplicar los estandards ODB, OBD-II y otros que han aparecido a lo largo del tiempo (EOBD, etc...), se utilizan protocolos de comunicacion
tales como las normas ISO 9141, ISO 9141-2, ISO 14230, KWP 2000, SAE J1850, SAE J1979, CAN BUS y VAN BUS entre otros. Algunos protocolos
han sido definidos por ISO o SAE, otros son implementaciones propietarias de algunos fabricantes (implementaciones propietarias son sistemas
propios de cada fabricante que no constituyen estandards en la industria y que solamente pueden ser empleados por dichos fabricantes,
por ejemplo Mercedes, BMW o VAG) pero todos estos protocolos cumplen con las especificaciones OBD, OBD-II, etc...

El escaner o equipo de diagnosis esta compuesto por un circuito electronico (hardware) y un programa informatico (software) que unidos entre si extraen
los datos de las UCEs de los coches. Por separado, cada componente realiza las siguientes funciones:
a) CIRCUITO ELECTRONICO (Hardware).- Es la pasarela entre la UCE del coche y el Ordenador y evita que cuando se conecte el
Ordenador con la UCE no se estropee ninguno de estos aparatos.
El circuito puede ser SIMPLE cuya funcion consista en regular voltajes y adaptar impedancias (valores de resistencias) entre la UCE y Ordenador
para evitar el deterioro de estos componentes, o bien un circuito COMPLEJO que, ademas de lo anterior, mantenga la comunicacion entre
UCE y Ordenador lo cual, en este caso, habra que añadirle un Cuarzo (señal de reloj) y un Microcontrolador (PIC) al que se le introducirá un
pequeño programa que se encargara de mantener la comunicacion entre Ordenador y UCE.
b) PROGRAMA INFORMATICO (Software).- Es el verdadero protagonista del sistema cuya mision consistira en mantener la comunicacion
entre Ordenador y UCE (en caso de que no lo haga el circuito) y ademas, enviará paquetes de datos (ceros y unos) a la UCE para establecer
la comunicacion y recibir datos que el integrado de la UCE haya registrado, mostrandose estos datos en la pantalla del monitor.
Resumiendo: La parte Hardware es el conjunto de elementos y circuitos que forman el aparato y la parte Software incluye el conjunto de datos e instrucciones internas que permiten la comunicacion con las centralitas o UCEs, usandose un protocolo de comunicaciones que representa el 'lenguaje o idioma' para el intercambio de datos.
En los coches fabricados hasta el año 1996, generalmente habia una unica UCE en la que sus distintos circuitos electronicos actuaban como
UCEs independientes, de manera que al entrar en cada una de ellas parece que estan separadas y sin embargo forman un mismo conjunto. Un mecanico
intentando realizar una reparacion aparentemente se encontraria con varias UCEs, aunque realmente solo habria una.
Posteriormente se colocaron varias UCEs utilizando circuitos independientes en distintas zonas del automovil conectadas por cientos de metros
de cables. En los sistemas que se utilizan hoy en dia (CAN, VAN BUS) funcionan como una red, con los distintos componentes unidos a traves de
dos unicos cables, el escaner se conecta al bus como un nuevo componente en la red.
Para comunicarse con las UCEs lo primero que debe hacer el escaner es 'despertarlas' (Wake Up) o activarlas, intentando buscar una respuesta
de la UCE con la que quiere comunicarse. Si hay respuesta, entoces sabemos que existe dicha UCE y podemos comunicarnos con ella para extraer
codigos de averias, borrar averias, cambiar parametros que utiliza como referencia o incluso leer valores que esta recibiendo la UCE del vehiculo,
consiguiendo asi aumentar o disminuir las rpm, codificar el cuadro para que utilice un idioma u otro, etc.
A veces nos encontraremos con escaners que nos indican que no hay una UCE presente en el vehiculo cuando sabemos que si la tiene. Cuando sucede
esto puede ser bien porque la UCE implementa un protocolo distinto para el cual el escaner no esta preparado, o bien porque los tiempos de espera
entre paquetes estan fuera de los convencionales.
Una vez establecida la comunicacion con la UCE lo primero que hacemos es identificarla, y en los tiempos muertos para mantener la comunicacion se
intercambian alternativamente paquetes de datos indicando confirmacion (ACK).
Existen innumerables casos curiosos que se pueden presentar al intentar acceder a las distintas UCEs de un vehiculo. Por ejemplo, un escaner de una marca muy conocida indica que un coche NO dispone de Airbag cuando en realidad, si que lo tiene. En este caso lo unico que pasa es que utiliza un tiempo superior al normal (unos 100ms) en el inicio de la comunicacion. En otra ocasion otro escaner indica que el coche no tiene motor cuando lo que ocurre es que el escaner no tiene implementado el protocolo utilizado por esa UCE en concreto. Tambien nos encontramos con casos en los que se nos indican unas averias que no tienen nada que ver con la realidad. Pero no debemos olvidar que, realmente, lo que la UCE almacena para representar las averias son dos bytes por averia y sera el software el que en funcion del numero extraido de la UCE decida cual es el texto que explica dicha averia. Un mismo codigo de averia, en funcion de la marca y modelo del coche y de la UCE puede indicar cosas diferentes, por ejemplo el codigo de averia 12 indica en:
- BMW con UCE Bosch Motronic = Sensor posicion mariposa
- BMW con UCE Siemens = Sensor velocidad del vehiculo
- Chrysler (Grand Cherokee, Stratus, etc) = Bateria desconectada
- Chrysler (Neon, Voyager, etc) = Tension de alimentacion
- Citroen con UCE Bosh, Magneti Marelli = Comienzo de secuencia
- Daewoo (Nexia, Lanos, Nubira, etc) = No hay averias
- Fiat (Tipo, Regata, etc) = No hay averia
- Ford (Fiesta 1.1/1.3, Excorpio, Transit 2.0, etc) = Medidor flujo volumen aire
- Ford (Fiesta 1.6, Escorpio, etc) = Sensor de fase
- Ford (Maverick 2.4) = Medidor flujo masa aire
- Ford (Sierra, Scorpio, Transit 2.9, etc) = Valvula control aire ralenti
- Ford (Probe, etc) = Sensor posicion mariposa
- Honda (Civic, Accord, Prelude, etc) = Sistema recirculacion gases escape
- Opel con UCE Bosch, GM Multec, etc = Inicio de diagnostico
- Subaru (Vivio, XT, Impreza, etc) = Interruptor motor arranque
- Suzuki (Swift, Baleno, Vitara, etc) = Señal normal
- Toyota (Corolla, Carina, Celica, etc) = Sensor regimen motor
Todos los ejemplos anteriores pertenecen al codigo de averia 12. Cuando un escaner indique una averia ¿SE CAMBIA LA PIEZA...? o debiera conocerse
perfectamente el FUNCIONAMIENTO de dicha Pieza o Componente y la forma de como trabaja en el motor.
Los protocolos de comunicaciones empleados para la conexion de las centralitas (en adelante UCEs) a los escaneres presentan incompatibilidades
entre si. Por desgracia cada fabricante ha optado por utilizar sus propios protocolos, es decir, un fabricante puede utilizar distintos protocolos
en distintos modelos de vehiculo e incluso un mismo fabricante puede utilizar distintos protocolos en un mismo modelo segun varie su año de fabricacion.
En ocasiones las diferencias pueden ser minimas pero suficientes para que existan incompatibilidades.
No solo los protocolos suponen un motivo de incompatibilidad ¿Que otros problemas se pueden encontrar a la hora de acceder a una UCE? Pues bien, en
algunos vehiculos se puede acceder a la UCE del Motor a una velocidad de 9600 baudios y a la UCE del Cuadro de Instrumentos a 10400 baudios y a la
UCE del Climatizador a 4800 baudios. Ademas, cada marca de coches tiene unos identificadores de entrada a cada UCE que no tienen porque coincidir
con los de otras marcas, por ejemplo un fabricante puede usar los siguientes identificadores de entrada a las UCEs: 01=motor, 02=Transmision,
03=ABS, 08=Climatizador, 15=Airbag, 17=Cuadro Instrumentos, 25 Inmovilizador, 35=Cierre centralizado, etc... mientras que otro fabricante
puede usar distintos identificadores para entrar a esas mismas UCEs.
Pero, ¿Para que sirven los protocolos?¿A quien afectan estas incompatibilidades? Los protocolos son los que permiten que las UCEs se comuniquen
con los dispositivos que manejan los mecanicos, comunmente llamados escaneres. Un escaner se emplea para acceder a una UCE y consultar su estado,
es decir, averiguar las averias del vehiculo, consultar parametros o modificarlos. Las incompatibilidades entre protocolos, velocidades,
identificadores, etc... implican que no existe un unico escaner que permita el acceso a todos los vehiculos. Cada fabricante dispone de sus
propios escaners, es mas, cada fabricante dispone de varios escaners dependiendo del modelo y año de fabricacion del coche
que se quiere reparar.
Como podemos observar, las incompatibilidades solo dificultan la tarea de reparar un vehiculo, ya que en muchas ocasiones un taller no
dispondra de todos los aparatos (escaneres) necesarios, no solo para los modelos de otras marcas sino tambien para la reparacion de todos los
modelos de su propia marca.
1º) Hay que mantener la comunicacion entre escaner y UCE del coche, en unos casos esto se consigue enviando y recibiendo paquetes de
bits a 50 milisegunos, en otros a 100 milisegundos, etc.
2º) A continuacion se envia el codigo de la UCE a chequear (01, 15, 17, etc...), dependiendo del vehiculo y del protocolo.
3º) Establecida la comunicacion entre escaner y UCE se envia desde el escaner lo que se desea chequear: Diagnostico de Averias, Leer
bloque valores, etc... cada orden se envia dentro del paquete correspondiente.
4º) Una vez entramos a la UCE, en algunos protocolos recibimos directamente la identificacion de la UCE, Clave de la pieza de recambios,
datos tecnicos basicos del motor, clave del fabricante, etc.
5º) Pedimos a la UCE las averias registradas, entonces la UCE devolvera la informacion en Binario. Por ejemplo:
0000001000000110 lo que en Hexadecimal es 0206 y en Decimal 00518
0000001000101001 lo que en Hexadecimal es 0229 y en Decimal 00553
0000001000101011 lo que en Hexadecimal es 022B y en Decimal 00555
El informatico asignara en el Software un nombre a cada Codigo de Averia, por ejemplo:
00518 = Potenciometro valvula de mariposa
00553 = Medidor masa de aire
00555 = Sonda lambda
A su vez cada Codigo de Averia contendra otras informaciones introducidas por el informatico o programador, como por ejemplo a un Codigo de Averia
concreto se le puede poner:
- Interrupcion/Cortocircuito a masa
- Señal no plausible
- Interrupcion/Cortocircuito a positivo
- Señal demasiado pequeña

Funcionamiento del sistema en la conexion a una UCE siguiendo un protocolo concreto para entrar en una UCE de Motor (01):
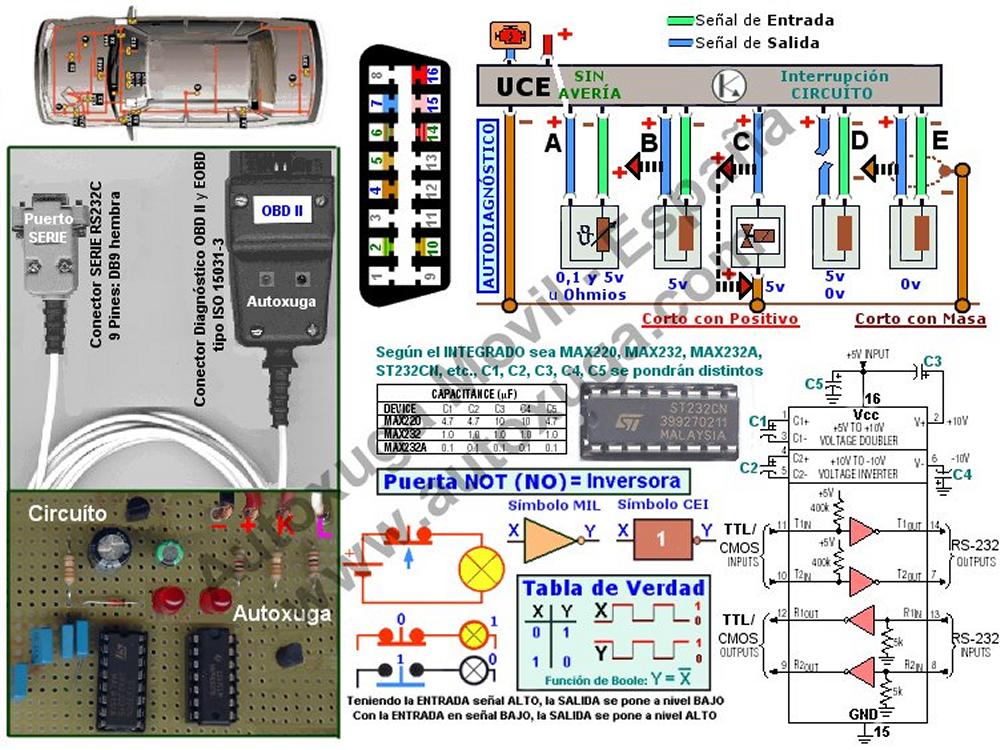
-Conectamos el escaner al automovil a traves del conector universal de diagnosis
-El escaner envia al automovil a traves de la linea K (linea de datos para autodiagnosis) la direccion de la UCE a la que deseamos
conectarnos (01) a una velocidad de 5 baudios
-La UCE, en caso de existir, devuelve un caracter en hexadecimal 55, que seria en binario 01010101, a la velocidad normal de
funcionamiento de la UCE (240, 1200, 2400, 4800, 9600, 10400, etc.). El escaner utiliza dicho byte para determinar la velocidad a la que
debe comunicarse con la UCE basandose en la duracion (milisegundos) de uno de los 8 bits recibidos. A partir de ahora toda la
comunicacion se realiza a dicha velocidad.
-La UCE a continuacion devuelve al escaner dos bytes (denominados KB1 y KB2) indicativos del protocolo especifico que utiliza la misma.
Por ejemplo segun el protocolo ISO9141 esos dos bytes serian en Hexadecimal 08-08, y que para el grupo VAG que implementan el
KWP1281 serian (01-8A), etc.
-El escaner debe enviar ahora a la UCE el complementario del KB2 y la UCE respondera bien con su identificacion (KWP1281) o bien
con el complementario de la direccion de la UCE.
-A partir de este momento se procede al intercambio de informacion entre escaner y UCE, distinguiendose tres tipos de paquetes:
1º).-Paquetes que se encargan de mantener la comunicacion. El escaner envia un paquete ACK a la UCE, y la UCE devuelve otro paquete ACK y
esto se repite a menos que se ordene al escaner que realice otra cosa. Si transcurre algun tiempo entre 100 milisegundos y 5 segundos
(dependiendo del protocolo sin intercambio de paquetes) se pierde la comunicacion del escaner con la UCE y es necesario reiniciar el proceso.
2º).-Paquetes de ordenes que envia el escaner a la UCE (Leer Averias almacenadas, borrarlas, leer bloques de valores, diagnostico de actuadores, etc)
que provocan que la UCE haga determinadas tareas. En algunos casos la orden le indica que devuelva datos al escaner y en otros realiza determinadas
tareas sobre distintos actuadores del automovil (Valvula Comienzo Inyeccion en motor, Segmentos en cuadro, etc.)
3º).-Finalmente la UCE transmite al escaner Paquetes con respuestas sobre la informacion solicitada, siendo tales paquetes:
Codigo recambios UCE... Averias almacenadas... Valores leidos de los distintos sensores, etc.







AUTOXUGA MOVIL, S.L.
Puente de Te, 16 - Taragoña
15985 Rianxo - A Coruña (ESPAÑA)
CIF:B-15587363
RegMer A Coruña, Tom 1874, Fol 143, Hoj C-17430
Tfno Movil: 629 88 44 13
autoxuga@autoxuga.com
www.autoxuga.com